и системах неразрушающего контроля


Принцип работы промышленного робота для паллетирования заключается в следующем: с помощью транспортных систем готовая продукция поступает в рабочую зону. Транспортные системы же представляют собой комплекс конвейеров, в который могут входить ленточные транспортеры и ролики различных типов. Датчики отслеживают положение паллета и продукции. С помощью специального захвата робот осуществляет взятие продукции с конвейерной системы и постановку на паллет.
Основные преимущества роботов компании FANUC:
- более 100 различных моделей роботов
- грузоподъемность до 2300 кг
- досягаемость до 4680 мм
- надежность 99.99 %
- простота в управлении
- оптимизированное энергопотребление
- доступность запасных частей, на протяжении всего жизненного цикла
Роботы для паллетирования FANUC представлены следующим модельным рядом:

Серия М-410
Данный робот предназначен для работы в тяжелых условиях эксплуатации с массой грузов до 700 кг отличается оптимизированным рабочим пространством и большой длиной хода по вертикали. Радиус рабочей зоны серии М-410 достигает 3,1 м. Высокая инерция и высокие моменты запястья М-410 позволяют работать с большими захватными устройствами и тяжелыми грузами на максимальной скорости.

Серия М-710iC/50H
Данный тип модификации роботов серии М-710 отличается компактным запястьем, жесткой конструкцией руки и узкой базой. Благодаря высокой скорости перемещения по пяти осям этот робот отличается чрезвычайной быстротой и идеально подходит для упаковывания и паллетирования.
Грузоподъемность достигает 50 кг, досягаемость – 2003 мм. Эти модели полностью защищены по стандарту IP67, поэтому они идеально подходят для работы в жестких условиях. Модель отличается высокими инерционными показателями и подходит для работы с большими изделиями, как например стальные панели.
Для интеграции рабочих органов на руке J3 имеются восемь встроенных входов и восемь встроенных выходов для подачи воздуха и электропитания, а также PROFIBUS в стандартной комплектации.

Серия R-1000iA /80H
Возможность высокоскоростного перемещения по пяти осям делает данную модификацию робота хорошим решением для выполнения операций по паллетированию, где требуются высокая скорость работы и максимальная надежность.
Благодаря грузоподъемности до 80 кг и радиусу рабочей зоны до 2,2 м стандартные роботы серии R-1000 с шестью или пятью осями идеально подходят для перемещения средних грузов.

Серия R-2000iB/100H
Данная модель пятиосевого робота серии R-2000 идеально подходит для выполнения операций по паллетированию, обладает высокой производительностью и грузоподъемностью в диапазоне до 100 кг. Досягаемость до 2,6 м. В данной серии достигается производительность 20 циклов в минуту при паллетировании коробок и 22–24 цикла в минуту при паллетировании пакетов.


Серия M-410
- M-410iB/140H — 5 осей
- M-410iB/450/700 — Полое запястье
- M-410iC/185 /315/500 — Полое запястье
Управляемых осей: от 4 до 5
Грузоподъемность: от 140 до 700 кг
Досягаемость: от 2850 до 3143 мм
Класс IP:
- корпус стандартный: IP54
- запястье и рука J3: IP54
Питание сети: 3-х фазное 380 – 575 В, 50/60 Гц
Среднее энергопотребление: 3 кВт
Повторяемость: ± 0.5 мм
| Нагрузка на кисть, кг | Досягаемость, мм | Вес, кг | Момент силы J4, Нм / Момент инерции, кгм² | Момент силы J5, Нм / Момент инерции, кгм² | Момент силы J6, Нм / Момент инерции, кгм² | iB140H | 140 | 2850 | 1200 | 147 | 53 | - |
| iC185 | 185 | 3143 | 1600 | 88 | - | - | iC315 | 315 | 3143 | 1600 | 155 | - | - |
| iB450 | 450 | 3130 | 2430 | 196 | - | - | iC500 | 500 | 3130 | 2410 | 250 | - | - |
| iB700 | 140 | 3130 | 2700 | 490 | - | - |
Углы поворота, °
| J1 | J2 | J3 | J4 | J5 | J6 | |
|---|---|---|---|---|---|---|
| iB 140H | 360 | 155 | 112 | 20 | 720 | - | iC 185 | 360 | 144 | 136 | 720 | - | - |
| iC 315 | 360 | 144 | 136 | 720 | - | - | iB 450 | 360 | 145 | 135 | 540 | - | - |
| iC 500 | 370 | 144 | 136 | 720 | - | - | iB 700 | 360 | 144 | 136 | 540 | - | - |
Максимальная скорость, °/с
| J1 | J2 | J3 | J4 | J5 | J6 | |
|---|---|---|---|---|---|---|
| iB 140H | 140 | 115 | 135 | 135 | 420 | - | iC 185 | 140 | 140 | 140 | 305 | - | - |
| iC 315 | 90 | 100 | 110 | 195 | - | - | iB 450 | 70 | 70 | 70 | 180 | - | - |
| iC 500 | 85 | 85 | 85 | 200 | - | - | iB 700 | 60 | 60 | 60 | 120 | - | - |

Серия M-710
- M-710iC/50H — 5 осей
Управляемых осей: 5
Грузоподъемность: 50 кг
Досягаемость: 2003мм
Класс IP:
- корпус стандартный: IP54
- корпус опциональный: IP67
- запястье и рука J3: IP67
Питание сети: 3-х фазное 380 – 575 В, 50/60 Гц
Среднее энергопотребление: 2,5 кВт
Повторяемость: ± 0.15 мм
| Нагрузка на кисть, кг | Досягаемость, мм | Вес, кг | Момент силы J4, Нм / Момент инерции, кгм² | Момент силы J5, Нм / Момент инерции, кгм² | Момент силы J6, Нм / Момент инерции, кгм² | 50H | 50 | 2003 | 540 | 150/6.3 | 68/2.5 | - |
Углы поворота, °
| J1 | J2 | J3 | J4 | J5 | J6 | |
|---|---|---|---|---|---|---|
| 50H | 360 | 225 | 440 | 234 | 720 | - |
Максимальная скорость, °/с
| J1 | J2 | J3 | J4 | J5 | J6 | |
|---|---|---|---|---|---|---|
| 50H | 175 | 175 | 175 | 175 | 720 | - |
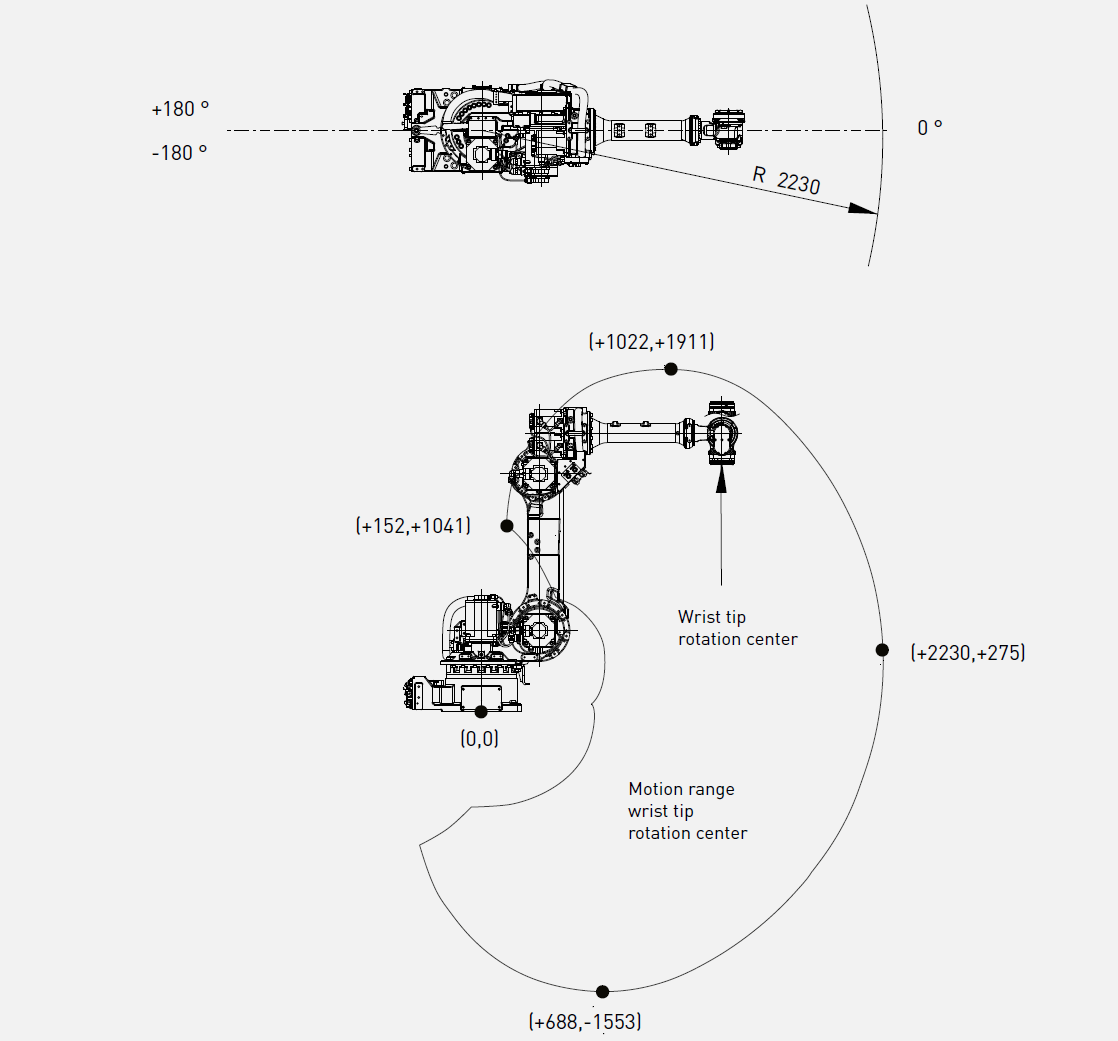
Серия R-1000
- R-1000iA/80H — 5 осей
Управляемых осей: 5
Грузоподъемность: 80 кг
Досягаемость: 2230 мм
Класс IP:
- корпус стандартный: IP54
- корпус опциональный: IP56
- запястье и рука J3: IP67
Питание сети: 3-х фазное 380 – 575 В, 50/60 Гц
Среднее энергопотребление: 2,5 кВт
Повторяемость: ± 0.2 мм
| Нагрузка на кисть, кг | Досягаемость, мм | Вес, кг | Момент силы J4, Нм / Момент инерции, кгм² | Момент силы J5, Нм / Момент инерции, кгм² | Момент силы J6, Нм / Момент инерции, кгм² | 50H | 80 | 2230 | 610 | /48 | -/25 | - |
Углы поворота, °
| J1 | J2 | J3 | J4 | J5 | J6 | |
|---|---|---|---|---|---|---|
| 50H | 360 | 245 | 215 | 20 | 720 | - |
Максимальная скорость, °/с
| J1 | J2 | J3 | J1 | J5 | J6 | |
|---|---|---|---|---|---|---|
| 50H | 185 | 180 | 180 | J4180 | 500 | - |
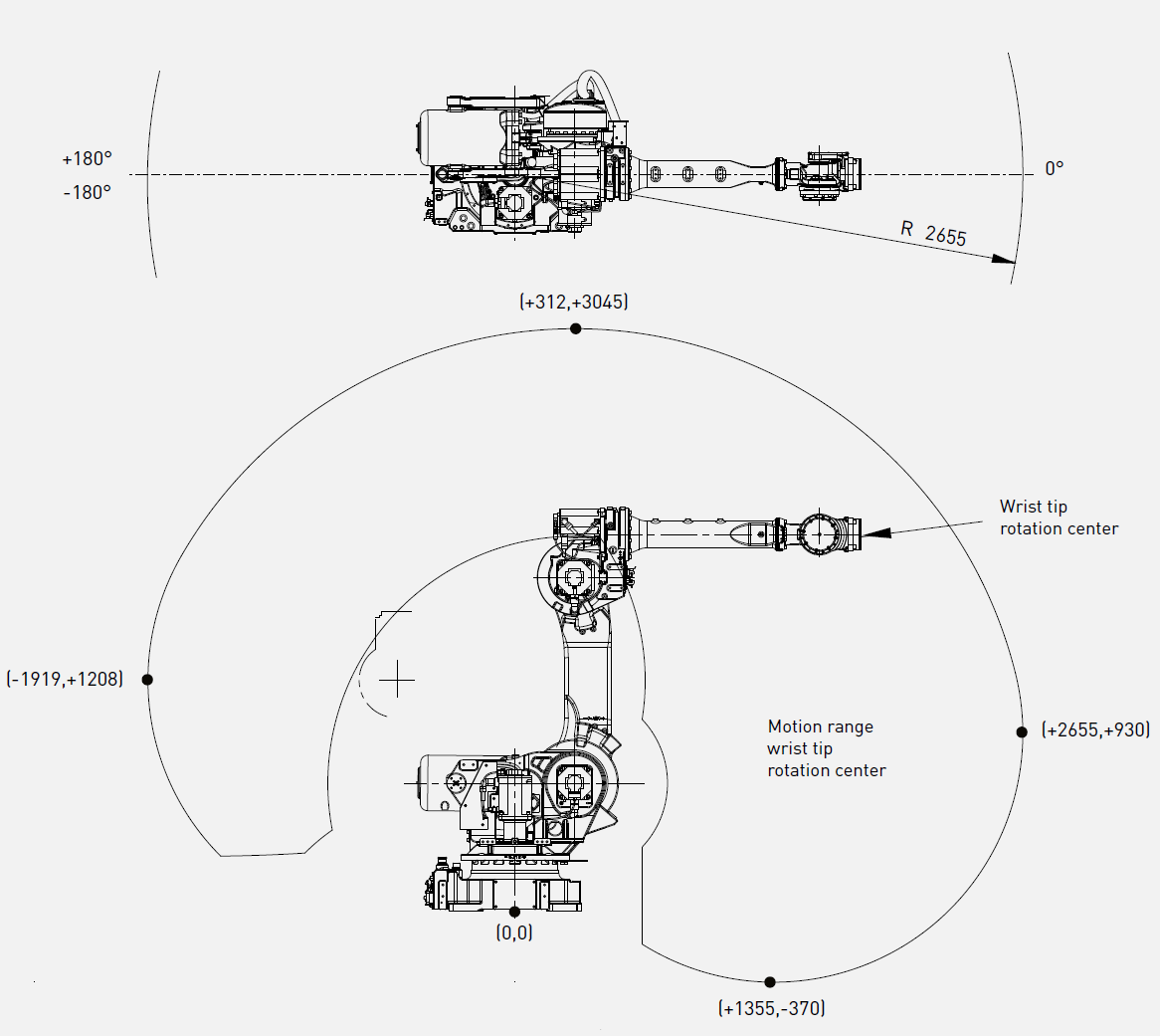
Серия R-2000
- R-2000iB/100H — 5 осей
Управляемых осей: 5
Грузоподъемность: 100 кг
Досягаемость: 2655 мм
Класс IP:
- корпус стандартный: IP54
- запястье и рука J3: IP67
Питание сети: 3-х фазное 380 – 575 В, 50/60 Гц
Среднее энергопотребление: 2,5 кВт
Повторяемость: ± 0.2 мм
| Нагрузка на кисть, кг | Досягаемость, мм | Вес, кг | Момент силы J4, Нм / Момент инерции, кгм² | Момент силы J5, Нм / Момент инерции, кгм² | Момент силы J6, Нм / Момент инерции, кгм² | 100H | 100 | 2655 | 1150 | 441/39.2 | 245/15.7 | - |
Углы поворота, °
| J1 | J2 | J3 | J4 | J5 | J6 | |
|---|---|---|---|---|---|---|
| 100H | 360 | 136 | 362 | 250 | 720 | - |
Максимальная скорость, °/с
| J1 | J2 | J3 | J4 | J5 | J6 | |
|---|---|---|---|---|---|---|
| 100H | 130 | 130 | 130 | 170 | 360 | - |








Этот полностью интегрируемый, стандартизированный и универсальный пакет дополнительных осей. Это может быть рельс, захватное устройство с сервоприводом, установленный или нестандартный манипулятор, два совместно работающих робота или робот с устройством позиционирования. Multi Group Motion поддерживает до восьми независимых групп движения, обеспечивает точную координацию роботов, повышает эксплуатационную гибкость и позволяет максимально эффективно использовать рабочую зону.
Данная функция позволяет управлять одновременно двумя, тремя или четырьмя роботами и внешней осью при использовании одного главного контроллера. Программирование системы осуществляется при помощи одного пульта iPendant.
Контроллер FANUC R-30iB — новый стандарт интеллектуальной производительности. Передовые технологии нового поколения, включающие новую аппаратную часть и более 250-ти функций программного обеспечения, являются ключевыми для быстрой, точной и безопасной работы робота. Максимальное удобство использования, высокая производительность и минимизированное энергопотребление обеспечивают общую высокую функциональность, надежность и упрощают работу. Для предоставления гибких и низких по затратам решений контроллер 30iB поставляется с разными вариантами шкафов.
Встроенный программируемый контроллер станка
Встроенный высокопроизводительный ПКС контроллера R-30iB обеспечивает доступ ко всей системе ввода-вывода робота, а также простое раздельное или асинхронное управление периферийными устройствами без ухудшения производительности.
Основные преимущества:
- компактный модульный дизайн с возможностью установки контроллеров друг на друга для рационального использования рабочего пространства;
- удобное управление при помощи пульта iPendantTouch;
- поддержка основных промышленных шин передачи данных и сетей безопасности;
- полная готовность для подключения таких функций, как техническое зрение, силомоментный датчик, синхронизация периферийного оборудования и т.д.;
- наличие 3-х Ethernet портов для задач интеграции;
- простая диагностика системы с помощью встроенной функции iRDiagnostics;
- отдельный процессор для высокопроизводительной обработки LADDER программ;
- Улучшенная энергоэффективность.
Существует 4 типа корпусов контроллеров:
- A-сabinet
- B-сabinet
- Mate-cabinet
- Open-Air cabinet

A-cabinet
Компактный стандартный контроллер, который разработан для работы с двумя вспомогательными осями. Контроллер хорошо подходит для работы в промышленных средах.

B-cabinet
Контроллер, в котором используется технология стандартного контроллера A-cabinet, но в нем предусмотрено дополнительное пространство для установки усилителей или модулей ввода-вывода. Контроллер хорошо подходит для работы в промышленных средах

Mate-cabinet
Мощный автономный контроллер для работы с малыми роботами. Контроллер разработан для роботов серии М и LR-Mate.

Open-Air cabinet
Контроллер предназначен для роботов серии LR-Mate и работы в подсобных помещениях, загрязненных и влажных средах.


Пульт R30iB iPendant Touch обладает интуитивно понятным интерфейсом, высокой скоростью работы и низким энергопотреблением. Наряду с эргономичным дизайном и большим цветным сенсорным экраном, он имеет функциональные кнопки для управления седьмой и восьмой осью. На дисплее могут отображаться одно или два окна, что очень удобно в многозадачном режиме. На дисплее также отображается трехмерная графика, более наглядно визуализирующая шаги программы для оператора по сравнению с двухмерной графикой. Дополнительно имеется визуализация траекторий перемещения и программных точек на карте узлов, что обеспечивает видимость траектории перемещения робота.Поддержка изометрических видов предусмотрена только в R30iB.
Также в функции индивидуальной настройки iPendant определение и создание пользовательских экранов HTML. В конструкции пульта предусмотрен USB-разъем для флэш-памяти или мышки.
Системы сервопозиционирования FANUC открывают новые возможности и расширяют спектр применимости роботов FANUC.В ситуациях, требующих точного позиционирования деталей и изделий, роботы FANUC могут оснащаться легко встраиваемыми одно- или двухосевыми устройствами позиционирования. Эти устройства поддерживают высокотехнологичные функции программного обеспечения, в частности координированное перемещение, позволяющее выдерживать постоянные скорости перемещения по поверхности. Имеется возможность выбора модели для ваших нужд с грузоподъемностью до 1500 кг.
Данные системы легко устанавливаются и программируются благодаря специализированному программному обеспечению FANUC и готовым к использованию функциям автономного программирования модуля FANUC Roboguide.

Одноосевое устройство позиционирования
Стандартное решение для большинства сфер применения. Предлагаются две версии со следующими техническими характеристиками:
| Грузоподъемность | 300 кг | 500 кг | Диапазон J1 | 740° | 740° |
| Скорость J1 | 160°/с | 130°/с | Момент J1 | 353 Нм | 588 Нм |
| Момент изгиба | 2450 Нм | 2920 Нм | Инерция J1 | 230 кг-м² | 360 кг-м² |
| Повторяемость | 0,05 мм | 0,05 мм | Вес | 85 кг | 88 кг |

Одноосевое полое устройство позиционирования
Обеспечивает улучшенную защиту кабелей в ситуациях, где вероятно их повреждение. Предлагаются две версии со следующими техническими характеристиками:
| Грузоподъемность | 1000 кг | 1500 кг | Диапазон J1 | 740° | 740° |
| Скорость J1 | 120°/с | 90°/с | Момент J1 | 1568 Нм | 1960 Нм |
| Момент изгиба | 20580 Нм | 20580 Нм | Инерция J1 | 461 кг-м² | 686 кг-м² |
| Повторяемость | 0,05 мм | 0,05 мм | Вес | 280 кг | 280 кг |

Компактное одноосевое устройство позиционирования
Отличается компактностью и может быстро работать с тяжелыми грузами. Предлагаются две версии со следующими техническими характеристиками:
| Грузоподъемность | 1000 кг | 1500 кг | Диапазон J1 | 740° | 740° |
| Скорость J1 | 120°/с | 90°/с | Момент J1 | 1568 Нм | 1960 Нм |
| Момент изгиба | 7056 Нм | 7056 Нм | Инерция J1 | 461 кг-м² | 686 кг-м² |
| Повторяемость | 0,05 мм | 0,05 мм | Вес | 130 кг | 130 кг |

Двухосевое устройство позиционирования дуги
Максимальные возможности гибкой обработки до 500 кг.
| Грузоподъемность | 500 кг | Диапазон | J1 | 270° |
| J2 | 480° | Скорость | J1 | 120° |
| J2 | 190° | Момент | J1 | 1764 Нм |
| J2 | 686 Нм | Инерция | J1 | 300 кг-м² |
| J2 | 300 кг-м² | Повторяемость | 0,05 мм |
| Вес | вес 295 кг |

iR Vision
Система визуального обнаружения по технологии plug&play, полностью интегрированная с контроллером R-30iB и отличающаяся быстрой установкой, простотой использования и гибкостью.
Благодаря системе распознавания двух- или трехмерных деталей она может определять местоположение произвольно расположенных изделий любой формы и размера. Система также может считывать штрих-коды, выполнять сортировку по цвету, гибкую подачу деталей, высокоскоростное визуальное линейное отслеживание (iR Pick Tool) и взятие коробов/панелей.

iR Pick Tool
Бюджетное следящее программное обеспечение для управления очередью FANUC, предназначенное для визуального отслеживания линии с одним или несколькими роботами. С помощью этого инструментального средства, как начинающие, так и опытные специалисты без каких-либо сложностей смогут создавать стандартные и индивидуальные конфигурации. Оно легко настраивается по технологии plug&play, не требует TP-программирования и предусматривает удобное управление через внешний пульт iPendant touch.

3D Area Sensor
Высокоскоростной пространственный барьерный датчик, который полностью интегрирован с контроллером робота и служит для мгновенного создания пространственных карт с использованием технологии технического зрения. Система позволяет роботу идентифицировать и брать отдельные детали, достигая продолжительности цикла от 8 до 12 секунд, даже если они покрыты грязью, ржавчиной, маслом или, если речь о пакетах, не имеют четко распознаваемых характеристик. Датчик легко настраивается с помощью ПК или FANUC iPendant Touch.
Доступны 2 типа датчиков:
- 3DA-400 для небольших ящиков (400 x 300 x 300 мм)
- 3DA-1300 для евро-паллет (1340 x 1000 x 1000 мм)
Чрезвычайно важным условием при конструировании роботизированного модуля является безопасность оператора. Безопасная компоновка может быть дорогостоящей, а также требовать большой производственной площади. Тем не менее компания FANUC разработала множество интеллектуальных решений в области безопасности, позволяющих минимизировать затраты и требуемую площадь при соблюдении высочайшего уровня безопасности операторов, роботов и оснастки.

DCS
Интеллектуальное интегрируемое ПО для обеспечения безопасности операторов, роботов и инструментов. С помощью FANUC iPendantTouch операторы могут визуализировать определенные зоны безопасности и просматривать трехмерные изображения этих зон перед роботизированными модулями.
DCS Joint или Cartesian Position Check Safety категории 3/Pld позволяет экономить площадь и обеспечивает безопасность операторов в самых маленьких зонах безопасности в пределах рабочей области, определенной 3D-датчиками пространства.



Устройство защиты при движении
Высокочувствительная система обнаружения столкновений (HSCD) позволяет минимизировать ущерб при столкновениях, а также оптимизировать продолжительность цикла и энергопотребление после идентификации грузоподъемности.
Преимущества:
- не требуется дополнительное оборудование;
- наименьшие зоны безопасности (50 см);
- чрезвычайно простая настройка зоны безопасности;
- удобное отображение группы движения;
- две отдельные цепи переключения для двойной безопасности.


Приложение FANUC Roboguide выполняет симуляцию как движений робота, так и команд для конкретной сферы применения и обеспечивает значительную экономию времени при создании новых настроек движения. Для гарантии минимального влияния на производство, модули можно разрабатывать, тестировать и изменять полностью автономно. Чтобы сократить время на трехмерное моделирование, модели деталей можно импортировать из ПК в виде данных САПР. Большая библиотека программного обеспечения для симуляции позволяет пользователям выбирать и изменять детали и размеры. Для работы с интуитивно-понятным и чрезвычайно простым в использовании приложением Roboguide требуется минимальное обучение. Оно также доступно со специализированными инструментальными средствами для конкретных сфер применения.
Основные преимущества и особенности ПО Roboguide:
- Для поиска оптимальных конструкций модулей при помощи Roboguide можно моделировать модули и выбирать наиболее подходящего робота для конкретного варианта применения и настройки
- Для экономии времени приложение позволяет предварительно запрограммировать роботов перед установкой в модуль, а также просмотреть и подтвердить траектории перемещения робота и параметры систем безопасности DCS перед загрузкой программ в реальный робот.
- Изменяемые шаблоны Roboguide упрощают настройку вспомогательных осей, устройств позиционирования и станков с несколькими группами движения.
- Мгновенный доступ ко многим широко используемым зажимным приспособлениям, столам, конвейерам и рабочим органам на руке. Дополнительные трехмерные формы предусмотрены как средства моделирования для создания пользовательских станков, инструментов и/или зажимных приспособлений. Пользователь может создать и сохранить собственную библиотеку САПР для ежедневного использования.
- Благодаря импорту моделей САПР для имеющихся траекторий перемещения, зажимных приспособлений и захватных устройств можно создавать компоновки и оценивать системы.
- Встроенная библиотека роботов приложения Roboguide обеспечивает мгновенный доступ к любому роботу FANUC. Для моделирования и симуляции всей системы каждый робот поставляется с контроллером виртуального робота (Virtual Robot Controller) и трехмерной САПР-моделью.
- Усовершенствование и отладку можно осуществлять без прерывания производства и с нулевым риском простоя, так как новые компоновки модулей и программ можно создавать в автономном режиме.
Дополнительно компания FANUC предлагает специализированные программные средства для симуляции движения

Handling PRO
Позволяет осуществлять симуляцию и тестирование операций загрузки-разгрузки материалов. Компоновки можно импортировать или создавать, а программы генерировать посредством получения траекторий перемещения с помощью САПР, а также с использованием толчкового перемещения в графическом режиме или обучения виртуального робота. Созданную программу можно полностью проверить.

Pallet PRO
Имитирует движение робота при выполнении перемещения с подающего конвейера на транспортный поддон во время паллетирования. Поддерживается до 5 конвейеров, 5 поддонов и 10 вариантов одновременного паллетирования нескольких изделий. Шаблоны паллетирования можно поворачивать на 180 градусов, чтобы оптимизировать штабелирование и предотвратить соприкосновение со сложенными объектами.